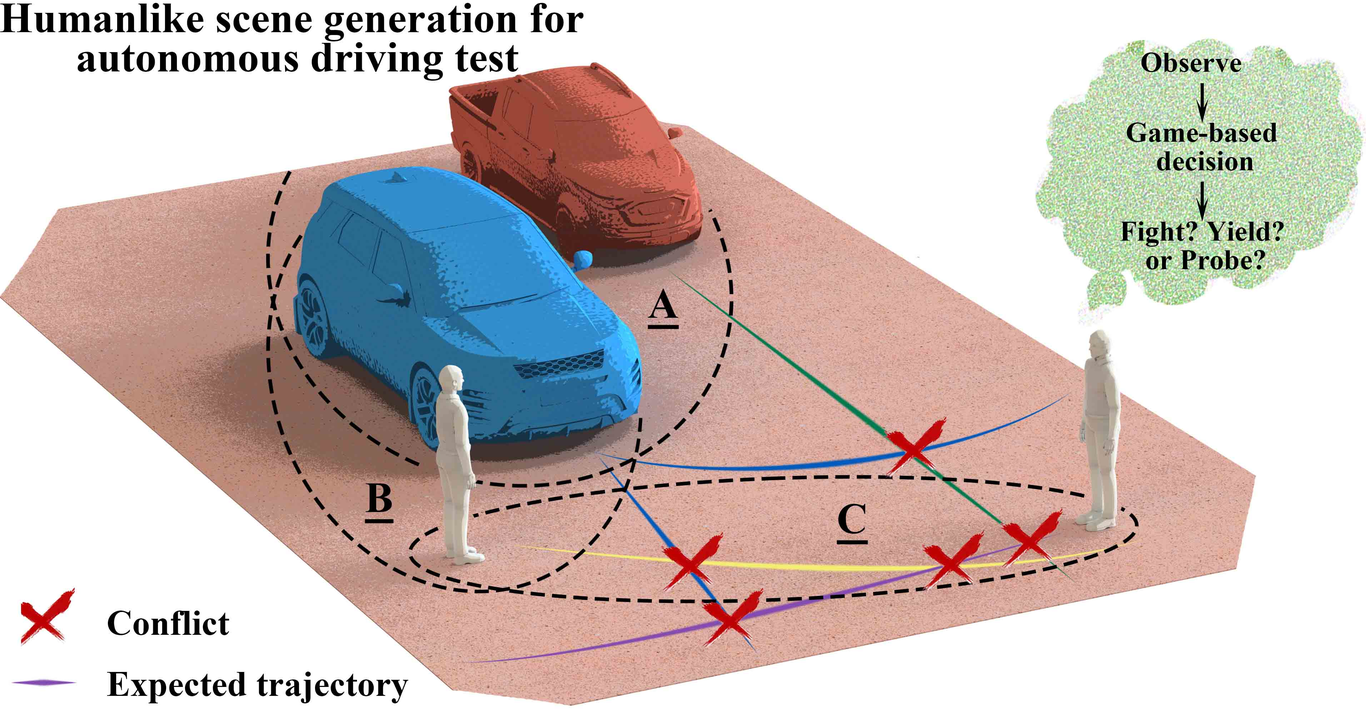
Interacting with surrounding road users is a key feature of vehicles and is critical for intelligence testing of autonomous vehicles. The Existing interaction modalities in autonomous vehicle simulation and testing are not sufficiently smart and can hardly reflect human-like behaviors in real world driving scenarios. To further improve the technology, in this work we present a novel hierarchical game-theoretical framework to represent naturalistic multi-modal interactions among road users in simulation and testing, which is then validated by the Turing test. Given that human drivers have no access to the complete information of the surrounding road users, the Bayesian game theory is utilized to model the decision-making process. Then, a probing behavior is generated by the proposed game theoretic model, and is further applied to control the vehicle via Markov chain. To validate the feasibility and effectiveness, the proposed method is tested through a series of experiments and compared with existing approaches. In addition, Turing tests are conducted to quantify the human-likeness of the proposed algorithm. The experiment results show that the proposed Bayesian game theoretic framework can effectively generate representative scenes of human-like decision-making during autonomous vehicle interactions, demonstrating its feasibility and effectiveness. Corresponding author(s) Email: [email protected]