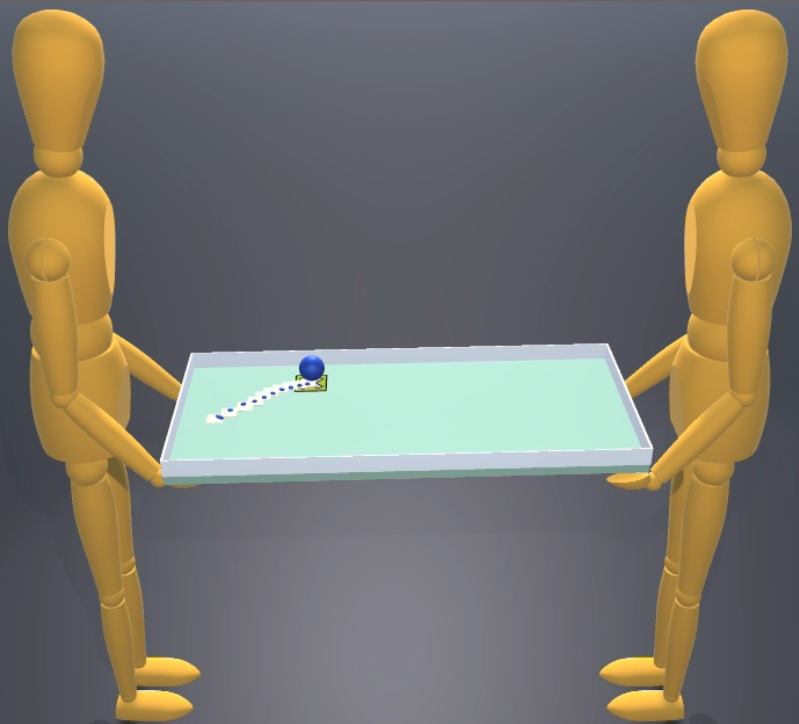
In order to be successfully executed, collaborative tasks performed by two agents often require a cooperative strategy to be learned. In this work, we propose a constraint-based multi-agent reinforcement learning approach called Constrained Multi-agent Soft Actor Critic (C-MSAC) to train control policies for simulated agents performing collaborative multi-phase tasks. Given a task with n phases, the first n-1 phases are treated as constraints for the final task phase objective, which is addressed with a centralized training and decentralized execution approach. We highlight our framework on a tray balancing task including two phases: tray lifting and cooperative tray control for target following. We evaluate our proposed approach and compare it against its unconstrained variant (MSAC). The performed comparisons show that C-MSAC leads to higher success rates, more robust control policies, and better generalization performance.