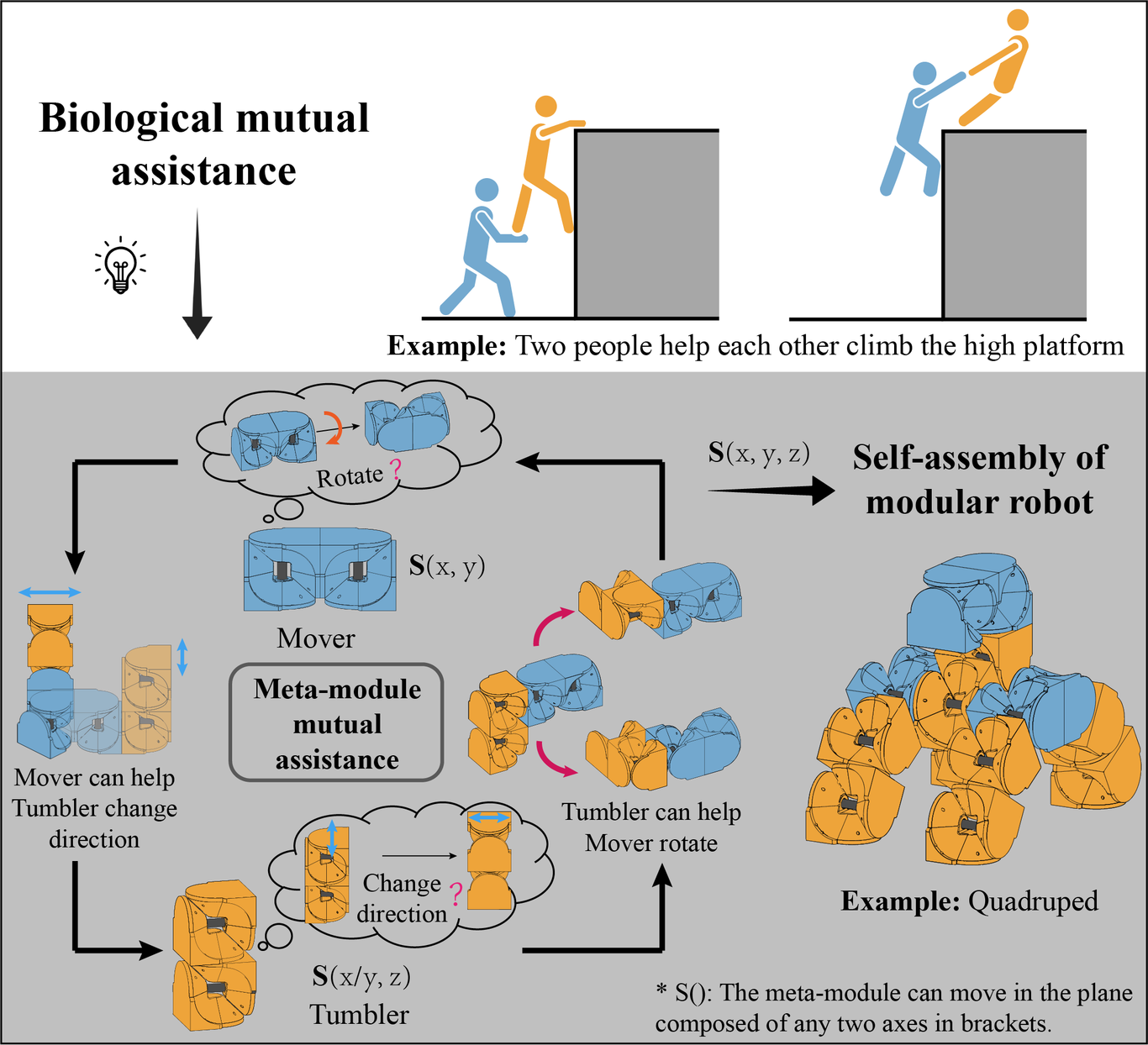
The theoretical capability of modular robot to organize the overall robot into different structures with different functions has broad prospects in space exploration. Therefore, we develop a novel modular space robot named Space Module, and inspired by biological cooperative and mutual assistance behaviors, a novel self-assembly method is proposed for it.To solve the mobility problem of non-mobile modules, a new meta-modules design for Space Module is presented, based on which the concept of mutual assistance is utilized to achieve position and posture reachability of assembled unit while minimizing the effect of meta-modules on granularity. Then, an assembly planner is designed to obtain the assembly sequences according to the unique motion characteristics of meta-module and mutual assistance to realize the self-manufacturing of desired configurations. Finally, several demonstrations are given to verify the validity and feasibility of the proposed assembly method.Corresponding author(s) Email: [email protected]